▼ 1. 머신러닝
1. 머신러닝의 정의
- 인공지능(AI), 머신러닝(ML), 딥러닝(DL)의 관계:
- 머신러닝은 인공지능의 하위 개념.
- 딥러닝은 머신러닝의 하위 개념.
- 머신러닝:
- 데이터를 이용하여 신경망과 딥러닝을 통해 자율 학습.
- 명시적 프로그래밍 없이 학습 가능.
2. 머신러닝의 과정
- 데이터를 수집하고 전처리.
- 머신러닝 모델 학습.
- 손실함수를 최적화하여 모델 파라미터 찾기.
- 학습 완료 후 최적의 모델로 예측 및 응용.
2. 데이터의 종류
- Training 데이터: 모델 훈련용 데이터.
- Validation 데이터: 모델 최적화를 확인하기 위한 데이터.
- Test 데이터: 최종 성능 검증용 데이터.
3. 머신러닝 주요 용어
- 데이터
- Label(Target): 예측하고자 하는 값 (예: y).
- Feature: 입력 변수 (예: x1,x2,…,xn).
- 모델: 데이터 기반 패턴 학습 및 예측/결정을 수행하는 알고리즘.
- 학습(Training):
- 데이터를 통해 모델의 최적 파라미터 탐색.
- 최적화를 통해 성능 개선.
- 모델 파라미터:
- 학습 과정에서 조정되는 내부 변수.
- 손실함수 최적화로 파라미터 조정.
- 예: m (기울기), b (절편).
- 손실함수:
- 모델 예측값과 실제 값의 차이를 측정하는 함수.
- 최적화:
- 손실함수를 최소화하는 수학적 과정.
4. 회귀(Regression)와 분류(Classification)
- Regression(회귀): 연속적인 값을 예측.
- 예: 평균 기온 예측.
- Classification(분류): 특정 카테고리를 예측.
- 예: 동물 이미지 분류.
5. Regression(회귀)의 종류
- 선형 회귀 (Linear Regression):
- 두 변수 간 선형 관계 분석.
- 왜 선형 회귀인가?
- 데이터의 노이즈에도 불구하고 선형 관계를 유지.
- 단순하지만 해석 가능성이 높음.
- 선형 모델의 구성
- 모델:
- 파라미터:
- m: 기울기.
- b: 절편.
- 목표:
- 손실함수 최적화를 통해 m, b를 조정.
- 로지스틱 회귀 (Logistic Regression):
- 0~1 사이의 확률 값으로 예측.
6. 최소 제곱법 (Least Squares) - 손실함수 최적화 방법
- 잔차제곱합 (RSS) - 손실함수:
- Residual(잔차): 예측 값과 실제 값의 차이.
- $$
$$ y_i: 실제값. $$
$$ \hat{y}_i: 모델 예측값. /수식 $$
- 최소화 조건 - RSS를 m과 b에 대해 편미분:
$$ \frac{\partial RSS}{\partial m} = 0, \quad \frac{\partial RSS}{\partial b} = 0 $$
- 편미분 계산:
$$ \frac{\partial RSS}{\partial m}: \frac{\partial}{\partial m} \sum_{i=1}^n \left( y_i - (mx_i + b) \right)^2 = -2 \sum_{i=1}^n x_i \left( y_i - (mx_i + b) \right) $$
$$ \frac{\partial RSS}{\partial b}: \frac{\partial}{\partial b} \sum_{i=1}^n \left( y_i - (mx_i + b) \right)^2 = -2 \sum_{i=1}^n \left( y_i - (mx_i + b) \right) $$
- 연립 방정식 - 위 두 식을 연립하여 m∗와 b∗를 구함:\sum_{i=1}^n y_i = m \sum_{i=1}^n x_i + nb $$
- $$ \sum_{i=1}^n x_i y_i = m \sum_{i=1}^n x_i^2 + b \sum_{i=1}^n x_i $$
- $$
- 최소 제곱 추정량(m와 b)의 계산 결과:
$$ 기울기 (m*):\frac{n \sum x_i y_i - \sum x_i \sum y_i}{n \sum x_i^2 - (\sum x_i)^2} $$
$$ 절편 (b*):\frac{\sum y_i - m^* \sum x_i}{n} $$
- 최적화 과정:
- RSS를 최소화하여 모델 파라미터 탐색.
- 한계:
- Outlier(이상치)에 민감.
▼ 2. 경사 하강법
1. 손실함수 복습
- 손실함수(Loss Function): 모델의 예측값과 실제값의 차이를 수치로 나타내는 함수.
- 예시: MSE, Cross-Entropy 등
- 최적화(Optimization): 손실함수를 최소화하기 위한 수학적 기법.
- 예시: 경사하강법, 최소제곱법
2. 경사하강법 (Gradient Descent)
- 목표: 손실함수의 최솟값을 찾아내는 것.
- 원리: 손실함수의 기울기를 계산하여 가장 가파르게 내려가는 방향으로 파라미터를 업데이트.
- 비유: 안개가 낀 산에서 산을 내려가는 과정처럼, 조금씩 방향을 조정하며 목적지에 도달.
경사하강법의 종료 조건
- 미분 계수가 0이 되는 지점(극소점)에 도달했을 때.
- 손실값이 일정 기준 이하로 작아지거나 더 이상 감소하지 않을 때.
다변수 함수에서의 적용

- 여러 변수에 대해 각각의 기울기를 계산하여 업데이트 진행.
3. Hyperparameter
- 경사하강법의 효율성과 정확도를 결정하는 중요한 요소들:
- 학습률(Learning Rate): 파라미터가 업데이트되는 크기를 조정.
- Batch 크기: 데이터를 몇 개씩 나눠서 학습할지 결정.
- Epoch 수: 전체 데이터셋을 학습하는 횟수.
4. 경사하강법의 한계
- 계산량 문제: 데이터가 많아질수록 계산량이 급증.
- Local Minimum 문제: 손실함수가 최솟값이 아닌 국소 최솟값에 갇힐 가능성.
- Plateau 문제: 손실함수의 변화가 거의 없는 평탄한 구간에 빠질 위험.


▼ 3. 인공 신경망
1. 인공신경망(Neural Network, NN)의 정의
- 입력 데이터와 출력 데이터 사이의 관계를 수학적 함수로 모델링한 구조임.
- 뇌의 학습 과정을 컴퓨터에서 구현한 인공지능 모델임.
2. 신경망의 구성 요소
- 노드(Node): 입력 데이터와 가중치를 기반으로 연산을 수행하며, 결과를 다음 단계로 전달함.
- 벡터 형식의 데이터 입력됨.
- 입력값에 가중치가 곱해짐.
- 활성화 함수를 통과하여 출력값을 생성함.
- 가중치(Weight): 데이터를 학습시키며 성능을 높이는 핵심 요소임.
- 계층(Layer): 다수의 노드가 연결된 형태로, 입력층(Input), 은닉층(Hidden), 출력층(Output)으로 구성됨.
3. 활성화 함수 (Activation Function)
1. 활성화 함수의 정의
- 비선형성을 도입하여 데이터의 복잡한 패턴을 학습 가능하게 만듦.
- 입력값을 그대로 전달하지 않고, 주로 비선형 함수를 통과시킴.

2. 활성화 함수의 종류
- ReLU (Rectified Linear Unit)
- 특성: 음수를 0으로, 양수는 그대로 출력.
- 장점: 계산이 간단하며, 학습 속도를 빠르게 함.
- 단점: 음수 값에서는 기울기가 0이 되어 학습되지 않는 Dead Neuron 문제 발생 가능.
- $$ f(x)=max(0,x) $$
- Sigmoid
- 특성: 출력값을 (0, 1) 사이로 변환.
- 장점: 확률 기반 출력에 적합.
- 단점: 입력값이 크거나 작으면 기울기가 0에 가까워지는 Gradient Vanishing 문제가 발생.
- $$ f(x) = \frac{1}{1 + e^{-x}} $$
- Tanh (Hyperbolic Tangent)
- 특성: 출력값을 (-1, 1) 사이로 변환.
- 장점: Sigmoid보다 중심이 0에 가까워 학습 효율이 높음.
- 단점: Gradient Vanishing 문제가 여전히 존재.
- $$ f(x) = \tanh(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}} $$
- Leaky ReLU
- 특성: ReLU에서 음수 값 영역에 작은 기울기를 추가하여 Dead Neuron 문제를 완화.
- 일반적으로 α 값은 0.01로 설정.
- $$ f(x) = \begin{cases} x, & \text{if } x > 0 \\ \alpha x, & \text{if } x \leq 0 \end{cases} $$
- Softmax
- 특성: 모든 출력값을 (0, 1) 사이로 변환하며, 합이 1이 되도록 정규화.
- 주로 분류 문제의 출력층에 사용됨.
- $$ f(x_i) = \frac{e^{x_i}}{\sum_{j=1}^N e^{x_j}} $$
활성화 함수의 선택 기준
- ReLU: 기본값으로 자주 사용됨. 대부분의 은닉층에서 효율적.
- Sigmoid/Tanh: 출력 값의 범위가 필요한 경우나 특정 문제에 적합.
- Softmax: 다중 클래스 분류 문제의 출력층에서 필수적으로 사용.
4. 신경망의 학습 단계
1. 데이터 전처리:
신경망 학습의 첫 단계는 데이터 전처리로, 입력 데이터의 품질을 높이고 학습 안정성을 확보하는 과정임.
1.1. 데이터 정규화 및 스케일링
- Feature Scaling: 입력 데이터의 스케일 차이를 줄여 학습 효율을 향상시킴.
- Min-Max Scaling:
- 데이터를 [0, 1] 범위로 변환.
- Standardization:
- 평균 0, 표준편차 1로 변환.
- Min-Max Scaling:
1.2. 결측값 처리
- 비어 있는 데이터를 평균, 중앙값으로 대체하거나 알고리즘 기반으로 대체.
1.3. 데이터 증강
- 기존 데이터를 변형하여 학습 다양성을 확보함.
- 예: 이미지 좌우 반전, 크기 조절, 텍스트 동의어 대체.
1.4. 데이터 분리
- 데이터를 학습(Training), 검증(Validation), 테스트(Test) 세트로 분리.
- 일반 비율: 70:20:10 또는 80:10:10.
2. 신경망 모델 구성
- 레이어 구성:
- 입력층(Input Layer): 데이터의 특성을 모델에 전달.
- 은닉층(Hidden Layer): 패턴 학습과 복잡한 연산 수행.
- 출력층(Output Layer): 최종 결과 출력.
- 가중치 초기화:
- He Initialization, Xavier Initialization을 사용해 학습 속도와 안정성을 높임.
- 활성화 함수 선택:
- 예: Leaky ReLU, ReLU, Sigmoid, Tanh
- Gradient Vanishing 문제
- 예: Leaky ReLU, ReLU, Sigmoid, Tanh
3. 손실 함수 정의 및 계산
- 손실 함수는 예측값과 실제값의 차이를 측정하여 모델의 성능을 평가.
- 손실 함수의 종류:

- CEE: 분류 문제에서는 주로 정답(yi)을 one-hot encoding하며 출력층에서 softmax 함수와 같이 쓰임.

4. 손실 함수 최적화
- Optimizer(최적화 기법):
- 손실값을 최소화하기 위해 가중치와 편향을 업데이트.
- 예: SGD, Adam, RMSprop.

- 학습률(Learning Rate):
- 가중치 업데이트 크기를 결정하며, 학습 속도와 안정성에 영향을 미침.
5. 순전파 (Forward Propagation)
- 입력 데이터가 네트워크를 통과하며 각 노드와 계층을 거쳐 최종 출력값을 생성.
- 과정:
- 입력값에 가중치를 곱하고 편향을 더한 값을 각 노드에서 계산.
- 활성화 함수를 통해 출력값을 다음 계층으로 전달.
- 출력층에서 최종 예측값을 생성.
순전파 예시:
$$ X=[1,2,3,4], W=[5,6,7,8], b=1 $$
$$ Y = \phi(X \cdot W + b) = \phi(71) $$
6. 역전파 (Backward Propagation)
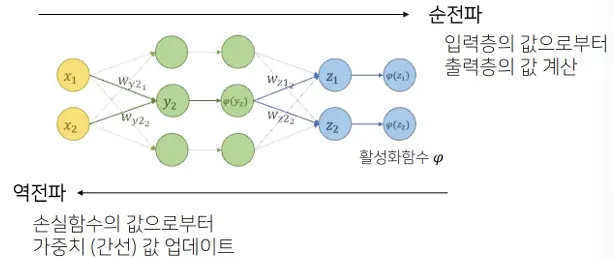
- 손실 함수의 기울기를 계산하여 가중치와 편향을 업데이트하는 과정.
- 연쇄 법칙(Chain Rule):
- 각 계층에서의 출력값이 이전 계층의 입력값에 의존하므로, 미분값을 계층별로 연쇄적으로 계산.
- 과정:
- 출력층에서 손실 함수를 기준으로 오차 계산.
- 오차를 기반으로 각 가중치와 편향에 대한 기울기(Gradient) 계산.
- Optimizer를 사용해 가중치와 편향을 업데이트.
순전파와 역전파 간의 상호작용
- 순전파는 예측값을 생성하고, 역전파는 이를 바탕으로 모델을 개선함.
- 이 과정이 학습 반복(epoch) 동안 지속되며, 손실 값이 점차 감소하게 됨.
5. 하이퍼파라미터 (Hyperparameter)
- 학습 과정에서 설정해야 하는 값들로, 모델의 성능에 영향을 미침.
- Learning Rate: 가중치 업데이트 크기.
- Batch Size: 학습 시 사용하는 데이터의 묶음 크기.
- Epoch: 전체 데이터셋을 학습하는 횟수.
6. 신경망 학습의 전체 과정
- 데이터 전처리 및 모델 설정.
- 손실 함수 및 Optimizer 선택.
- 하이퍼파라미터 조정.
- 학습 종료 조건을 만족할 때까지 반복.
7. 요약
- 신경망은 수학적 모델을 기반으로 데이터 학습 및 예측을 수행함.
- 손실함수를 최소화하기 위해 순전파와 역전파를 반복하여 가중치를 업데이트함.
- 효율적인 학습을 위해 적절한 하이퍼파라미터와 Optimizer를 설정해야 함.
▼ 4. CNN
1. 컴퓨터가 이미지를 인식하는 방식
- 비트맵 이미지:
- 각 위치의 픽셀들이 색상 정보를 저장.
- 흑백 이미지: 픽셀 값이 0(검은색)에서 255(흰색) 사이로 표현.
- 컬러 이미지: RGB 채널로 구성, 각 채널의 값이 0~255로 표현됨.
- 이미지 데이터의 속성:
- 이미지는 3차원 배열로 표현 (Width × Height × Channel(=Depth)).
2. 밀집 신경망에서 CNN으로
- 밀집 신경망(DNN)은 입력 데이터를 1차원 벡터로 변환하여 학습.
- 이미지의 공간적 구조(Width, Height)를 반영하지 못함.
- CNN은 공간적 정보를 유지하며 학습 가능하므로 이미지 처리에 적합.
3. CNN의 구조
CNN은 다음과 같은 계층으로 구성됨:

- 합성곱 계층 (Convolutional Layer):
- 이미지를 필터(Filter)로 스캔하여 특징을 추출.
- 필터 크기(Kernel Size), 스트라이드(Stride), 패딩(Padding) 등 하이퍼파라미터가 중요.
- 필터는 학습을 통해 최적화됨.
- 풀링 계층 (Pooling Layer):
- 데이터 크기를 줄이고 계산량을 감소시키며, 과적합 방지.
- 풀링 연산은 각 채널별로 독립적으로 수행됨.
- 종류:
- 최대 풀링(Max Pooling): 영역 내 최대값 선택.
- 평균 풀링(Average Pooling): 영역 내 평균값 선택.
- 밀집 계층 (Fully Connected Layer):
- 이미지 데이터를 1차원 벡터로 변환(Flatten)하여 분류나 예측 수행.
4. 합성곱 연산


- 필터(Filter):
- 입력 데이터에서 특정 특징을 추출하는 역할.
- 필터의 크기와 이동 간격(Stride)을 결정해야 함.
- 패딩(Padding):
- 가장자리 정보 손실을 방지하기 위해 입력 데이터 주변에 값(주로 0)을 추가.
- 패딩 종류:
- Valid Padding: 패딩 없음.
- Same Padding: 출력 크기를 입력 크기와 동일하게 유지.
- 편향(Bias):
- 합성곱 연산에 포함되어 필터 연산을 거친 출력에 동일하게 더함.
- 출력 크기 계산:
- $$ \text{Output Size} = \frac{\text{Input Size} - \text{Filter Size} + 2 \times \text{Padding}}{\text{Stride}} + 1 $$
5. 다중 채널 이미지에 대한 합성곱 연산 정리
- 다중 채널 이미지와 합성곱 연산
- 컬러 이미지:
- 일반적으로 RGB 채널로 구성되며, 각 채널이 독립적인 데이터를 가짐.
- 예: 3개의 채널을 가진 (Width×Height×3) 크기의 데이터.
- 합성곱 연산의 조건:
- 입력 데이터의 채널 수와 필터(Filter)의 채널 수는 동일해야 함.
- 필터는 각 채널에 대해 독립적으로 가중치를 학습하고, 결과를 합산하여 출력값을 생성.
- 컬러 이미지:
- 출력 채널이 여러 개인 경우
- 출력 채널 수를 늘리려면 필터 개수를 증가시켜야 함.
- 출력 채널 계산:
- 입력 데이터의 채널 수와 관계없이 필터 개수가 출력 데이터의 채널 수를 결정.
- 예:
- 입력 데이터: (Width×Height×3) (채널 3개)
- 필터: 3개의 채널을 가진 2개의 필터
- 출력 데이터: (Width×Height×2) (채널 2개)
- 학습과정에서의 필터
- 필터의 역할:
- 입력 데이터에서 특징을 추출.
- 필터는 학습 과정에서 갱신되는 모델 파라미터로, 최적의 값을 찾아 학습됨.
- 출력 데이터:
- 필터의 값에 따라 신경망의 최종 출력값이 달라짐.
- 따라서 필터는 CNN 학습 과정에서 매우 중요한 요소임.
- 필터의 역할:
- 정리

- 입력 데이터의 채널 수는 필터의 채널 수와 같아야 함.
- 출력 데이터의 채널 수는 사용된 필터 개수에 의해 결정됨.
- 필터는 학습을 통해 갱신되며, 신경망이 데이터의 특징을 정확히 추출할 수 있도록 조정됨.
6. CNN 학습 과정

- 합성곱 계층:
- 필터를 학습하며 이미지의 특징을 추출.
- 활성화 함수 적용:
- 주로 ReLU(Rectified Linear Unit) 사용.
- 비선형성을 추가하여 복잡한 패턴 학습 가능.
- 풀링 계층:
- 데이터의 크기를 축소.
- 특징 유지 및 과적합 방지.
- Flatten:
- 2차원 행렬 데이터를 밀집 계층에 전달하기 위해 1차원 벡터로 변환.
- 밀집 계층:
- 최종 분류나 예측 수행.
- 손실 함수 및 최적화:
- 손실 값을 기준으로 가중치와 편향을 업데이트.
- Optimizer 예: SGD, Adam.
7. AlexNet
- 등장 배경:
- 2012년 ILSVRC 대회에서 우승하며 CNN 대중화.
- 구조:

- 8개의 계층(5개의 합성곱 계층 + 3개의 밀집 계층).
- 드롭아웃(Dropout) 및 ReLU를 활용하여 과적합 방지와 학습 속도 향상.
- 출력 크기 계산:$$ W_{\text{out}} = \frac{W_{\text{in}} - W_{\text{filter}} + 2P}{S} + 1 $$
- $$ H_{\text{out}} = \frac{H_{\text{in}} - H_{\text{filter}} + 2P}{S} + 1 $$
8. CNN 전체 흐름
- 입력 이미지 → 합성곱 계층 → 활성화 함수 → 풀링 계층 반복.
- Flatten → 밀집 계층 → 최종 출력.
- 손실 함수와 역전파를 통해 필터와 가중치를 업데이트하며 학습.
▼ 5. Segmentation & Object Detection
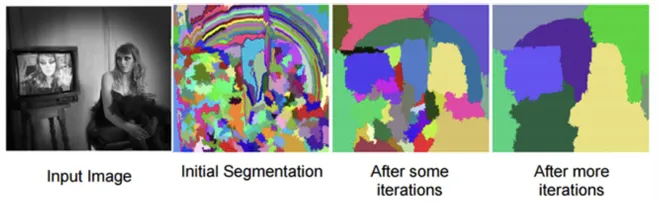
Segmentation

- 정의: 이미지를 픽셀 레벨로 이해하는 접근법.
- 픽셀 하나하나에 분류 또는 탐지를 수행.
- 동일한 라벨을 가진 모든 픽셀이 동일한 객체 또는 클래스에 속하도록 픽셀에 라벨을 할당.
- 이미지 분류(image classification)보다 더 어려움.
- 활용 분야: 자율주행, 로봇공학, 의료 영상 분석 등.
- 입출력
- Input: RGB 또는 흑백 이미지.
- Output: 각 픽셀이 속하는 클래스를 나타내는 Map.
Segmentation 종류
- Semantic Segmentation

- 같은 클래스 내의 인스턴스를 구별하지 않음.
- Instance Segmentation

- 같은 클래스 내에서도 다른 인스턴스를 구분.

Semantic Segmentation 기법
1. 픽셀 기반 분류
- 모든 픽셀마다 개별적으로 분류.
- 정확하지만 계산량이 많아 비효율적.
2. Bilinear Interpolation

- 일부 픽셀만 학습하고 나머지는 추정.
- 장점: 계산량 감소, 학습 시간 단축.
- 단점: 정확도 감소 가능.
3. Convolution 기반 모델
- 문제점: 기존 모델(VGG, ResNet)은 위치 정보 손실.
- 해결: Downsampling, Upsampling 및 Encoder-Decoder 구조 사용.
- Encoder: 차원 축소.
- Decoder: 차원 복원.
- Transpose Convolution

- 모델:
- FCN: VGG16을 전이 학습, Fully Connected Layer 제거, Fully Convolution Layer 대체, Transposed Convolution 통해 압축된 heat map을 확장, Skip Connection 적용하여 정보 전달.

- DeepLab: Dilated Convolution으로 FCN의 receptive field 문제 해결.

- U-Net: U자형 구조, Skip Connection 활용.
성능 평가 (Performance Measure)
- IoU (Intersection over Union)
- 공통 영역과 전체 영역의 비율로 정확도 평가.

- PQ (Panoptic Quality):

Object Detection (객체 탐지)
- 정의
- 디지털 이미지와 비디오에서 특정한 객체 인스턴스(예: 인간, 자동차)를 감지하는 컴퓨터 기술.
- 주로 컴퓨터 비전, 이미지 처리와 관련.
- 주요 응용 분야: 얼굴 검출, 보행자 검출 등.
- Object Detection vs. Image Classification
- Image Classification:
- 이미지에 주 대상 물체가 하나만 있다고 가정.
- 목표: 대상 물체의 카테고리를 식별.
- Object Detection:
- 이미지에 하나 이상의 대상이 존재.
- 목표: 대상의 카테고리와 위치를 특정.
- 동시에 분류(Classification)와 회귀(Regression)를 수행.

- Image Classification:
- Output 예시
- Bounding Box 좌표 (x, y, w, h) 및 클래스 레이블과 확률.
- x, y: 경계 박스 중심점.
- w, h: 경계 박스의 너비와 높이.
- Bounding Box 좌표 (x, y, w, h) 및 클래스 레이블과 확률.
Object Detection Pipeline

- 입력 이미지 (Input Image):
- 디지털 이미지 또는 비디오 프레임.
- 예: 고양이, 개, 자동차 등 다양한 객체 포함.
- Pretrained Feature Extractor:

- 모델:
- VGG, ResNet 등 사전 학습된 CNN 사용.
- MS COCO, ImageNet과 같은 데이터셋으로 학습됨.
- 기능:
- 객체의 특징 맵(Feature Map)을 생성.
- 일반화 성능이 높은 이미지 분류 모델 선택.
- Region Proposal (영역 제안):

- 목적:
- 객체가 있을 가능성이 높은 관심 영역(ROI)을 선택.
- 기법:
- RPN (Region Proposal Network).
- Selective Search.
- Sliding Window.
- Object Detection Network:
- 구조:
- Fully Connected Layer (fc-layer) 포함.
- 물체를 감싸는 **경계 박스(Bounding Box)**를 예측.
- 좌표: x,y,w,h.
- x, y: 중심점 좌표.
- w, h: 너비와 높이.
- Classification:
- 각 객체의 클래스와 확률 (Softmax 사용).
- 구조:
Object Detection 알고리즘
- Region Proposal (영역 제안)
- 객체가 있을 가능성이 높은 영역(Region)을 후보로 추출.
- 방법:
- Sliding Window:

- 윈도우를 이미지 상단에서 하단으로 이동하며 Region을 탐색.
- 단점: 계산 비용 높음, 정확도 낮음.
- Selective Search:
- 컬러, 크기, 형태 기반으로 유사한 영역을 그룹화.
- 최적의 Bounding Box를 선택.
- RPN (Region Proposal Network):
- CNN으로 특징 맵을 추출하여 객체 존재 확률과 경계를 예측.
- 학습 가능한 네트워크로 효율적 탐색 가능.
- Sliding Window:
- 1-Stage Detector vs. 2-Stage Detector
- 1-Stage Detector:
- Region Proposal과 Classification을 동시에 수행.
- YOLO, SSD.
- 특징: 빠른 속도.
- 2-Stage Detector:
- Region Proposal과 Classification을 순차적으로 수행.
- R-CNN, Fast R-CNN, Faster R-CNN.
- 특징: 높은 정확도.
- 1-Stage Detector:
- Non-Maximum Suppression (NMS)

- 동일 객체를 여러 박스로 탐지하는 문제 해결.
- 높은 Objectness Score를 가진 박스만 유지, 나머지를 제거.
- 기준:
- Confidence Score: 0.6
- 특정 바운딩 박스안에 있는 객체가 어떤 물체의 클래스일 확률
- Softmax 단계로 도출된 확률값 X IoU
- 즉, 각 바운딩 박스안에 물체가 있을 확률
- IoU (Intersection over Union): 0.5
- 두 박스의 중첩률 계산 (0~1 범위).
- 중첩률은 정확한 예측을 정의하는 용도로 사용됨.
- 중첩률이 설정된 임계값보다 크면 정확한 예측이 됨을 의미함.
- 일반적으로 0.5가 많이 사용됨.
- Confidence Score: 0.6
- 평가 지표
- mIoU:
- 모든 클래스에 대한 각 Object에 그려지는 모든 Bounding Box의 IoU를 평균낸 것.
- mAP (mean Average Precision):
- 모든 클래스에 대해 PR 곡선을 구해 AP를 계산.
- 각 클래스의 AP 평균값을 mAP로 계산.
- mAP 계산 방법
- 각 Bounding Box와 Confidence Score 계산.
- Precision과 Recall 계산.
- PR 곡선 작성.
- 곡선 아래 면적(AP) 계산.
- 모든 클래스에 대해 AP 평균값(mAP) 계산.
- mAP 계산 방법
- mIoU:
mAP - Precision과 Recall 조정
- Precision 정의:
- 모델이 "사과"라고 예측한 것 중 실제로 "사과"인 비율.
- Precision을 100%로 올리는 방법:
- 모델이 "틀린 예측(FP)"이 없도록 조정.
- 예시:
- 사과 10개, 배 10개가 주어진 상황.
- 모델이 "사과"라고 예측한 것 중 9개가 실제 사과, 1개가 배인 경우:
- $$ Precision = \frac{9}{10} = 90\% $$
- Precision 100%를 위해:
- 모델이 확실한 사과 5개만 예측하고, 나머지 사과와 배를 "사과가 아니다"로 분류.
- 문제점:
- 많은 "사과"를 놓쳐 Recall(실제 사과를 찾아내는 능력)이 낮아짐.
- Recall 정의:
- 실제 "사과" 중에서 모델이 "사과"라고 올바르게 예측한 비율.
- Recall을 100%로 올리는 방법:
- 모든 "사과"를 놓치지 않도록 조정.
- 예시:
- 사과 10개, 배 10개가 주어진 상황.
- 모델이 실제 사과 9개를 "사과"라고 예측, 1개를 배로 예측한 경우:
- $$ Recall = \frac{9}{10} = 90\% $$
- Recall 100%를 위해:
- 모델이 사과 10개와 배 10개 모두를 "사과"라고 예측.
- 문제점:
- 배도 "사과"로 잘못 예측하여 Precision이 낮아짐.
mAP - Precision-Recall (PR) 곡선

- 정의:
- Precision과 Recall 간의 관계를 그래프로 표현.
- 목적:
- Precision과 Recall의 변화 추적.
- 모델 성능 평가.
- PR 곡선 작성 과정:
- True Positive (TP)와 False Positive (FP)를 계산.
- 모든 예측에 대해 Precision과 Recall을 계산.
- 계산된 값으로 PR 곡선을 그림.
- PR 곡선의 의미:
- Recall이 증가해도 Precision이 감소하지 않으면 성능이 뛰어나다는 의미.
- PR 곡선 아래 면적(AP, Average Precision)을 계산하여 모델 성능 평가.
발전 과정

▼ 6. GAN
GAN (Generative Adversarial Networks)
https://ahxlzjt.tistory.com/16
- 정의:
- GAN: Generative Adversarial Nets.
- 이미지를 생성하기 위한 인공지능 모델.
- 구조:
- Generator (생성자):
- 노이즈(Latent Vector)를 입력으로 받아 훈련 데이터와 유사한 데이터를 생성.
- Discriminator (판별자):
- 입력 데이터가 진짜(Real)인지 가짜(Fake)인지 판별.
- Generator (생성자):
- 비유:
- 위조 지폐 사례:
- Generator: 위조 지폐 제작.
- Discriminator: 위조 지폐 감별.
- 위조 지폐 사례:
GAN의 작동 원리
- 입력 및 출력:
- Fake: D(G(z))=0 (가짜 이미지).
- Real: D(x)=1 (진짜 이미지).
- z: 노이즈 벡터.
- x: 실제 데이터.
Loss Function
- 전체 목표:
- GAN은 **Generator (G)**와 **Discriminator (D)**가 서로 경쟁하는 구조로 학습.
- Generator는 Discriminator를 속이는 방향으로 학습하고, Discriminator는 진짜와 가짜를 구분하는 방향으로 학습.
- Discriminator의 손실 함수:
- 목표:
- 진짜 데이터를 1로, 가짜 데이터를 0으로 정확히 분류.
- 수식:
- x: 실제 데이터.
- z: 랜덤 노이즈 (Latent Vector).
- D(x): Discriminator가 실제 데이터를 진짜로 예측한 확률.
- D(G(z)): Discriminator가 Generator가 만든 가짜 데이터를 진짜로 예측한 확률.
- $$ L_D = - \mathbb{E}{x \sim p{\text{data}}(x)}[\log D(x)] - \mathbb{E}_{z \sim p_z(z)}[\log(1 - D(G(z)))] $$
- 해석:
- 첫 번째 항: Discriminator가 진짜 데이터를 진짜로 판별하는 손실.
- 두 번째 항: Discriminator가 가짜 데이터를 가짜로 판별하는 손실.
- 목표:
- Generator의 손실 함수:
- 목표:
- Generator가 생성한 가짜 데이터를 Discriminator가 진짜로 판단하게끔 속임.
- 수식:
- G(z): Generator가 생성한 가짜 데이터.
- D(G(z)): Discriminator가 가짜 데이터를 진짜로 판별한 확률.
- $$ L_G = - \mathbb{E}_{z \sim p_z(z)}[\log D(G(z))] $$
- 해석:
- Generator는 D(G(z))가 높아지도록 (즉, Discriminator가 속도록) 학습.
- 목표:
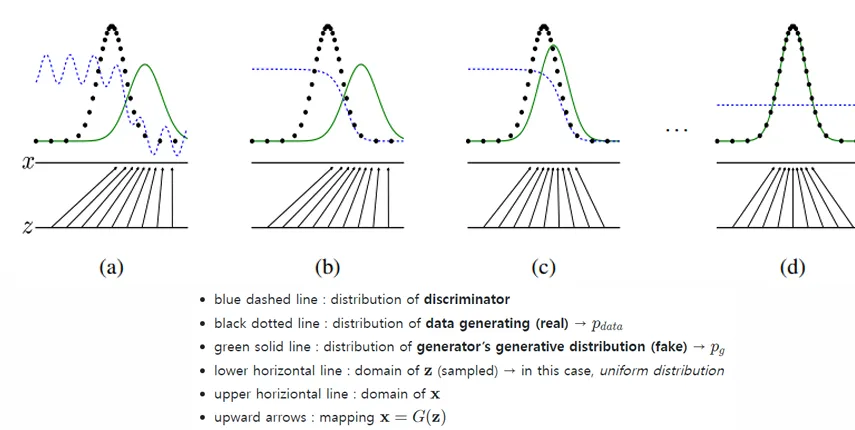
- 미니맥스 게임 형태:
- GAN의 전체 학습 과정은 미니맥스 게임으로 정의.
- 목표 수식:
- Generator는 손실을 최소화(minG).
- Discriminator는 손실을 최대화(maxD).
- $$ \min_G \max_D V(D, G) = \mathbb{E}{x \sim p{\text{data}}(x)}[\log D(x)] + \mathbb{E}_{z \sim p_z(z)}[\log(1 - D(G(z)))] $$
- 수렴 시 결과:
- Generator가 이상적으로 학습되면, Generator가 만든 가짜 데이터의 분포가 실제 데이터의 분포와 동일해짐:
- D(x)≈0.5 (진짜와 가짜를 구분할 수 없음).
- 이때 V(D,G)의 최적값은 −log(4).
- Generator가 이상적으로 학습되면, Generator가 만든 가짜 데이터의 분포가 실제 데이터의 분포와 동일해짐:
왜 Loss Function이 중요한가?
- Generator와 Discriminator의 균형:
- Generator와 Discriminator가 너무 강하거나 약하면 학습이 불안정.
- Discriminator가 너무 강하면 Generator가 학습하지 못함.
- Generator가 너무 강하면 Discriminator가 가짜를 구분하지 못함.
- Generator와 Discriminator가 너무 강하거나 약하면 학습이 불안정.
- 학습 안정성 문제:
- GAN은 훈련 초기에는 Loss가 명확히 감소하지 않을 수 있음.
- 이를 해결하기 위해 DCGAN에서는 Batch Normalization, Strided Convolutions 등이 도입됨.
GAN의 구성 요소
1. Generator:

- 목표: 노이즈 벡터를 훈련 데이터의 분포와 비슷하게 변환.
- 구조:
- Fully Connected Layer (FCN).
- 활성화 함수: ReLU.
- 데이터 변환 후 이미지 생성.
2. Discriminator:

- 목표: 입력 데이터가 Real(1)인지 Fake(0)인지 분류.
- 구조:
- Fully Connected Layer (FCN).
- 활성화 함수: ReLU 및 Sigmoid.
- 출력: 0 또는 1.
3. 학습 방식:
- Discriminator: 지도 학습(Supervised Learning).
- Generator: 비지도 학습(Unsupervised Learning).
DCGAN (Deep Convolutional GAN)
https://ahxlzjt.tistory.com/40
- DCGAN의 특징:
- G와 D에서 Fully Connected Layer(FCN) 대신 Convolution Layer 사용.
- Pooling Layer를 사용하지 않고, Strided Convolutions로 대체.
- Batch Normalization을 사용하여 학습 안정화.
- CNN 구조로 공간 정보를 학습하여 연속적인 이미지 생성 가능.
- Generator 구조:

- Upconvolution → BatchNorm → ReLU → 이미지 출력.
3. Discriminator 구조:

- Convolution → BatchNorm → ReLU → Sigmoid → 0 또는 1 출력.
'Theory > Computer Vision' 카테고리의 다른 글
| [의학영상처리] 정리본 (0) | 2025.02.09 |
|---|